Première sortie pour le robot spatial d'EPFL Xplore

L’acier brillant, dressé sur ses six roues, avec un système de suspension rocker-bogie sur le modèle de ceux développés par la NASA, un bras robotisé et un lidar prêt à scanner l’environnement, il trône dans la pièce. L’entourant, ses concepteurs le présentent avec verve. Le Rover « Argos », en référence à « Argo », mythique vaisseau conduit par Jason pour récupérer la Toison d’or, est né du néant en une année.
Sélectionné à l’une des plus importantes compétitions internationales, l’European Rover Challenge, il va être mis à l’épreuve du 10 au 12 septembre à Kielce en Pologne. Une compétition dans laquelle les équipes doivent démontrer que leur rover est capable d’analyser le terrain, d’effectuer différentes tâches de manière fiable, de se déplacer en semi ou totale autonomie et de collecter des échantillons.
De quoi réjouir les quatre étudiants à la base du projet EPFL Xplore, qui ont décidé de concevoir un Rover, après avoir eu vent du University Rover Challenge, se déroulant chaque année dans le désert au sud de l’Utah. Etudiants en 1ère année de Master en microtechnique et robotique, respectivement président et vice-président d’EPFL Xplore, Jonathan Wei et Quentin Delfosse sont des anciens membres de l’EPFL Rocket Team, amateurs de robotique et avides de nouveaux défis.
Ingénieur système, veillant notamment à la coordination du projet sur le plan technique, Thomas Manteaux effectue sa seconde année de Master en microtechnique. Il apprécie le lien entre robotique et mécanique ainsi que l’interdisciplinarité du projet. «C’est un bon complément aux cours dans lesquels on n’apprend pas les manipulations. Je n’avais par exemple jamais touché à une machine d’usinage. Cela permet aussi de créer des liens avec des personnes de différentes sections.»
Le quatrième argonaute est Arion Zimmermann, étudiant en 1ère année de Master en génie électrique et électronique. C’est un afficionado de programmation, qu’il pratique depuis l’âge de 12 ans. «Ca me plait, car c’est un acte de création. On peut construire un logiciel infiniment complexe à partir de rien, étant uniquement limité par notre propre imagination.» Après avoir contribué au développement de l’ordinateur de bord d’une fusée pour l’EPFL Rocket Team, il a ressenti le besoin d’exercer sa créativité dans un nouveau projet. Ingénieur système au départ, il s’est finalement retrouvé à «construire les parties du Rover pour lesquelles nous n’avions trouvé personne pouvant s’en charger.» Il a donc développé le protocole de communication entre le Rover et la station de contrôle, mais aussi la batterie avec une capacité d’environ 600Wh, le système de sécurité, l’alimentation principale du Rover et la simulation du comportement des moteurs.
Les mains dans le cambouis
Actuellement, EPFL Xplore réunit une cinquantaine d’étudiantes et étudiants de toutes les facultés. En tant que projet labellisé MAKE, il est soutenu par l’EPFL et donne droit à des crédits pour des projets de semestre ou de Master. Il est aussi encadré par un responsable académique, Alexandre Alahi, professeur assistant tenure track à l’EPFL et responsable du laboratoire Intelligence Visuelle pour les Transports (VITA), et David Rodriguez, ingénieur au Centre spatial de l’EPFL.
«L’équipe est divisée en sept groupes, chacun en charge d’un « sous-système » du rover. Gérer la communication entre les groupes et la planification du projet a constitué un challenge. Nous avons surestimé le temps à disposition et avons dû beaucoup travailler dans la phase finale pour pouvoir tester le robot avant la compétition», explique Quentin Delfosse.
La conception des algorithmes pour la navigation autonome à l’aide du lidar a notamment demandé beaucoup plus de temps que prévu. «Pour analyser l’environnement et éviter les obstacles, il faut superposer de nombreuses informations et avoir des algorithmes qui travaillent en parallèle», précise le vice-président d’EPFL Xplore. Et de poursuivre en mentionnant un autre défi, « la création d’une interface entre les sous-systèmes pour gérer les quatorze moteurs, car nous avions deux protocoles de communication.»
Tests fructueux
L’équipe a réussi à surmonter ces obstacles, y compris celui du budget. « Nous avons bénéficié d’environ 115’000 francs. Au début, c’était très dur de rechercher des fonds, sans rien à présenter aux éventuels sponsors », se souvient Jonathan Wei, qui a beaucoup appris en termes de sponsoring mais aussi de management.
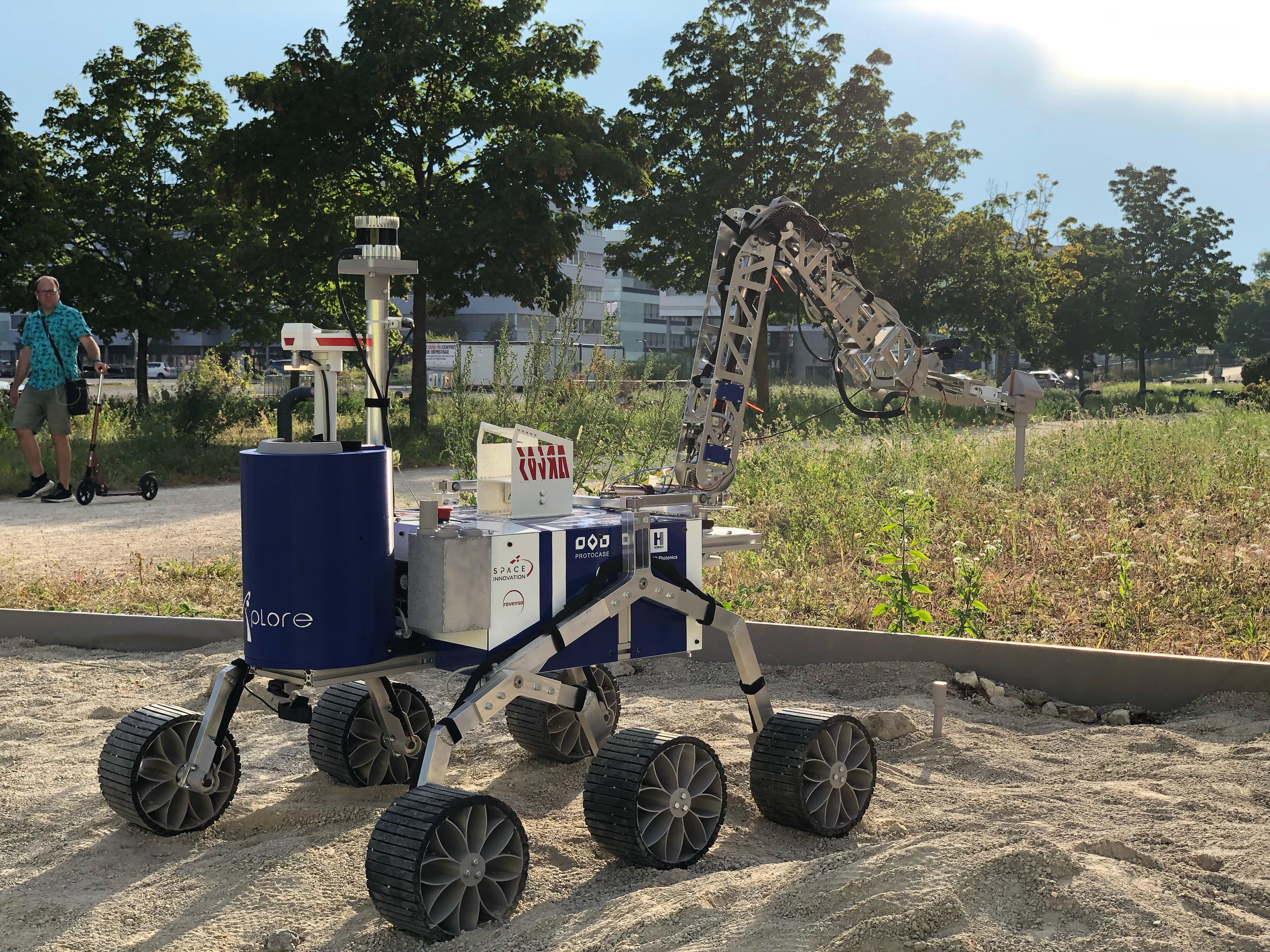
Le Rover au «Mars Yard». © EPFL Xplore 2021
Durant plus d’un mois, les étudiantes et étudiants d’EPFL Xplore ont pu tester leur Rover sur le campus pour les dernières finitions. Ceci au «Mars Yard» réalisé par leurs soins. Soit un rectangle composé de sable et de cailloux épars. «Nous sommes très contents du résultat, nous avons réussi à créer un Rover fiable et performant, même s’il pourrait être plus compact et léger. Depuis les premiers tests nous avons réussi à l’alléger un peu, mais il dépasse toujours les 50 kg réglementaires, et nous ne pouvons pas remplacer certaines pièces en acier par des pièces imprimées, car ces dernières ne possèdent pas les propriétés mécaniques appropriées. C’est une première, nous avons encore de la marge d’optimisation. La compétition marquera certes une étape dans notre développement mais cette étape sera forcément enrichissante, peu importe le résultat», constatent les quatre étudiants à la base du projet. Ces argonautes ont d’ailleurs l’ambition de conduire leur robot au fameux University Rover Challenge. En parallèle, ils désirent aussi élaborer un robot polaire destiné aux missions scientifiques, première étape avant de décrocher la lune.
