Modéliser la complexité des mouvements de la main grâce à l'IA
Dans les domaines des neurosciences et de l'ingénierie biomédicale, la modélisation précise des mouvements complexes de la main humaine a longtemps constitué un défi majeur. Les modèles actuels ont souvent du mal à capturer l'interaction complexe entre les commandes motrices du cerveau et les actions physiques des muscles et des tendons. Cette lacune entrave non seulement les progrès scientifiques, mais limite également le développement de neuroprothèses efficaces destinées à restaurer la fonction de la main chez les personnes amputées ou paralysées.
Le professeur Alexander Mathis de l'EPFL et son équipe ont développé une approche innovante basée sur l'intelligence artificielle qui permet de mieux comprendre ces fonctions motrices complexes. L'équipe a fait preuve d'innovation en utilisant une stratégie d'apprentissage automatique qui combine l’apprentissage par renforcement basé sur un curriculum avec des simulations biomécaniques détaillées.
Leurs recherches présentent un modèle dynamique détaillé et anatomiquement précis du mouvement de la main, inspiré directement de la manière dont les humains apprennent des compétences motrices complexes. Cette étude, qui a remporté le défi MyoChallenge lors de la conférence NeurIPS en 2022, a également été publiée dans la revue Neuron.
Contrôler virtuellement des boules de Baoding
«Ce qui me passionne le plus dans cette recherche, c'est que nous plongeons au cœur des principes fondamentaux du contrôle moteur humain, un domaine longtemps mystérieux. Nous ne nous contentons pas de construire des modèles, nous dévoilons les mécanismes essentiels par lesquels le cerveau et les muscles collaborent», confie le professeur Mathis.
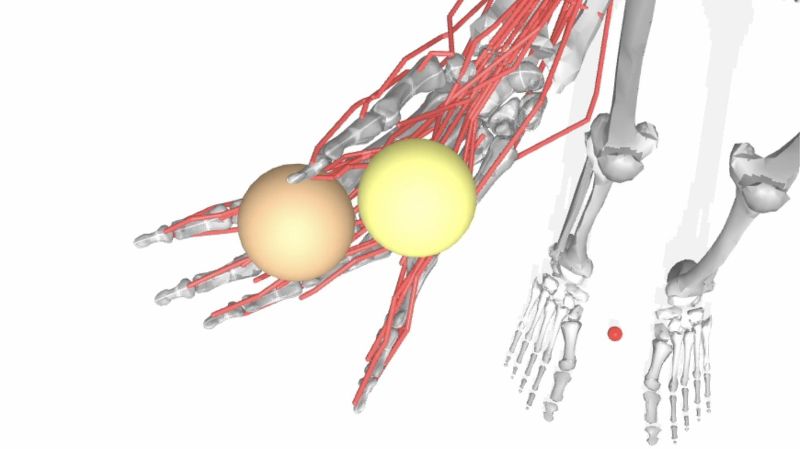
Le défi NeurIPS, proposé par Meta, a incité l'équipe de l'EPFL à explorer une nouvelle approche d'une technique d'IA appelée apprentissage par renforcement. La tâche consistait à créer une IA capable de manipuler précisément deux boules de Baoding, chacune contrôlée par 39 muscles de manière hautement coordonnée. Cette tâche, en apparence simple, est extrêmement difficile à reproduire virtuellement en raison des dynamiques complexes des mouvements de la main, notamment la synchronisation musculaire et le maintien de l'équilibre.
Dans ce contexte très compétitif, trois étudiants en doctorat – Alberto Chiappa du groupe d’Alexander Mathis, Pablo Tano et Nisheet Patel du groupe d'Alexandre Pouget à l'Université de Genève – ont surpassé leurs concurrentes et concurrents de manière significative. Leur modèle d'IA a atteint un taux de réussite de 100 % lors de la première phase de la compétition, dépassant de loin ainsi l'équipe rivale la plus proche. Même lors de la deuxième phase, plus difficile, leur modèle a démontré sa robustesse dans des situations de plus en plus complexes, maintenant une avance confortable pour remporter le concours.
Fractionner les tâches complexes – et les répéter
«Pour gagner, nous nous sommes inspirés de la manière dont les humains apprennent des compétences sophistiquées, un processus connu sous le nom d’entraînement segmenté dans le domaine des sciences du sport», explique le professeur Alexander Mathis. Cette approche a inspiré la méthode d'apprentissage par curriculum utilisée dans le modèle d'IA, où la tâche complexe de contrôle des mouvements de la main a été décomposée en parties plus petites et plus gérables.
«Pour surmonter les limites des modèles d'apprentissage automatique actuels, nous avons appliqué une méthode appelée apprentissage renforcement basé sur un curriculum. Après 32 étapes et près de 400 heures d'entraînement, nous avons réussi à entraîner un réseau neuronal à contrôler avec précision un modèle réaliste de la main humaine», déclare Alberto Chiappa.
Une des clés du succès du modèle réside dans sa capacité à reconnaître et à utiliser des motifs de mouvements répétitifs de base appelés primitives motrices. Cette approche d'apprentissage comportemental pourrait éclairer les neurosciences quant au rôle du cerveau dans l'apprentissage des primitives motrices pour maîtriser de nouvelles tâches. Cette interaction complexe entre le cerveau et la manipulation musculaire illustre à quel point il est difficile de créer des machines et des prothèses qui imitent véritablement les mouvements humains.
«Il faut un large éventail de mouvements et un modèle qui ressemble à un cerveau humain pour accomplir diverses tâches quotidiennes. Même si chaque tâche peut être décomposée en petites parties, chacune nécessite un ensemble différent de ces primitives motrices pour être bien réalisée», souligne Alexander Mathis.
Exploiter l'IA pour explorer et comprendre les systèmes biologiques
Silvestro Micera, un chercheur de premier plan en neuroprothèses à l'Institut Neuro X de l'EPFL et collaborateur du professeur Mathis, souligne l'importance cruciale de cette recherche pour comprendre le potentiel futur et les limites actuelles des prothèses, même les plus avancées. «Ce qui nous manque vraiment aujourd'hui, c'est une compréhension plus approfondie de la manière dont les mouvements des doigts et le contrôle moteur, lors de la préhension, sont réalisés. Ce travail va exactement dans cette direction cruciale», note le professeur Micera. «Nous savons à quel point il est important de connecter les prothèses au système nerveux, et cette recherche nous offre une base scientifique solide qui renforce notre stratégie.»
Abigail Ingster, une étudiante en Bachelor au moment de la compétition et lauréate de la bourse Summer in the Lab de l'EPFL, a joué un rôle central dans l'analyse de la politique d’apprentissage. Avec sa bourse soutenant une expérience de recherche pratique, Abigail a travaillé en étroite collaboration avec Alberto Chiappa, doctorant, et le professeur Mathis pour explorer les mécanismes complexes de la politique d'apprentissage de l'IA.
