Un robot nageur miniature inspiré des vers plats marins
Les robots nageurs jouent un rôle crucial dans la cartographie de la pollution, l’étude des écosystèmes aquatiques et la surveillance de la qualité de l’eau dans les zones sensibles telles que les récifs coralliens ou les rives des lacs. Cependant, la plupart de ces robots sont pourvus d’hélices bruyantes, qui peuvent perturber ou nuire à la faune, et l’encombrement naturel de ces environnements – plantes, animaux et débris – pose un défi aux robots nageurs.
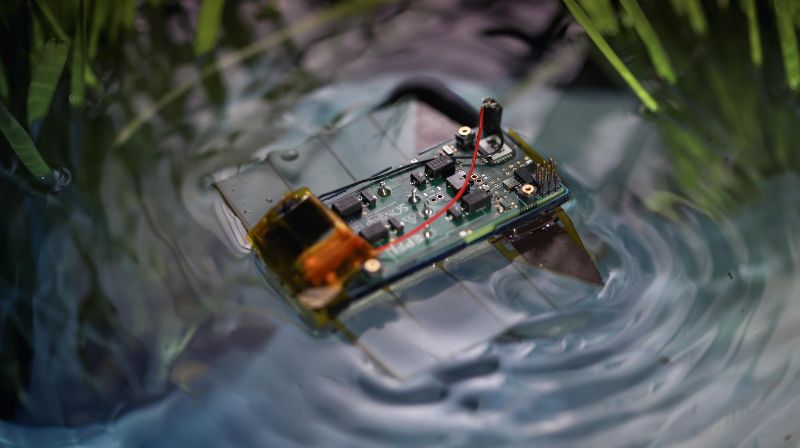
Aujourd’hui, des scientifiques du Laboratoire des microsystèmes souples et du Laboratoire de diagnostic des écoulements instationnaires de la Faculté des sciences et techniques de l’ingénieur de l’EPFL, et de l’institut Max Planck ont mis au point un robot compact et polyvalent capable d’évoluer dans des espaces restreints. Plus petit qu’une carte de crédit, pesant seulement 6 grammes, ce robot agile est idéal pour les environnements où l’espace est limité, comme les rizières, ou pour les mesures et inspections localisées dans des machines aquatiques. La recherche a été publiée dans Science Robotics.
«En 2020, notre équipe a développé des robots rampants autonomes de la taille d’un insecte, mais fabriquer des robots ultraminces pour les environnements aquatiques est un tout autre défi», explique Herbert Shea, responsable du Laboratoire des microsystèmes souples de l’EPFL. «Nous avons dû repartir de zéro, développer des actionneurs souples plus puissants, de nouvelles stratégies de locomotion ondulatoire et une électronique haute tension compacte.»
De l’électronique miniature pour un fonctionnement autonome
Contrairement aux systèmes traditionnels à hélice, le robot de l’EPFL utilise des nageoires latérales qui ondulent, inspirées des nageoires de certains vers plats marins. Le design léger et extrêmement plat du robot nageur lui permet de flotter à la surface de l’eau, et de se fondre parfaitement dans les environnements naturels.
«Notre conception ne se contente pas de reproduire la nature; elle va au-delà de ce que les organismes naturels peuvent réaliser», explique Florian Hartmann, ancien chercheur de l’EPFL, aujourd’hui responsable d’un groupe de recherche à l’Institut Max Planck pour les systèmes intelligents à Stuttgart, en Allemagne.
En faisant osciller ses nageoires jusqu’à 10 fois plus vite que les vers plats marins, le robot peut atteindre des vitesses impressionnantes de 12 centimètres (2,6 longueurs de corps) par seconde. Grace à l’utilisation de quatre muscles artificiels, le robot fait preuve d’une manœuvrabilité sans précédent, lui permettant de nager en marche arrière et sur les côtés.
Pour piloter le robot, les chercheurs ont mis au point une alimentations électronique compacte qui fournit jusqu'à 500 volts aux actionneurs à une faible puissance de 500 milliwatts, soit quatre fois moins que pour une brosse à dents électrique. Malgré la haute tension, les faibles courants et les circuits blindés rendent le robot totalement sûr pour son environnement. Des capteurs de lumière agissent comme de simples yeux, permettant au robot de détecter et de suivre les sources lumineuses de manière autonome.
Le robot pourrait servir à mener des études écologiques, au suivi de la pollution et à l’agriculture de précision. La prochaine étape consiste à créer une plateforme plus robuste pour les essais sur le terrain.
«Nous voulons allonger les temps de fonctionnement et améliorer l’autonomie», affirme Florian Hartmann. «Les connaissances fondamentales acquises grâce à ce projet font non seulement progresser la science de la robotique bioinspirée, mais posent également les bases de systèmes robotiques pratiques et réalistes qui s’harmonisent avec le monde naturel.»
