Wenn Drohnen mit beiden Füssen abheben
Das Labor für intelligente Systeme (LIS) der EPFL School of Engineering unter der Leitung von Dario Floreano hat diese Redewendung mit RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments) wörtlich genommen. Die multifunktionalen Roboterbeine sind Vögeln wie Raben und Krähen nachempfunden, die häufig zwischen Luft und Land wechseln, und ermöglichen einen autonomen Start in Umgebungen, die für geflügelte Drohnen bisher unerreichbar waren.
«Vögel waren die erste Inspiration für Flugzeuge, und die Gebrüder Wright haben diesen Traum wahr gemacht, aber selbst die heutigen Flugzeuge sind noch weit von dem entfernt, wozu Vögel fähig sind», sagt der LIS-Doktorand Won Dong Shin: «Vögel können vom Gehen zum Laufen in die Luft und wieder zurück wechseln, ohne die Hilfe einer Landebahn oder eines Startgeräts. In der Robotik fehlt es noch an technischen Plattformen für diese Art von Bewegungen.»
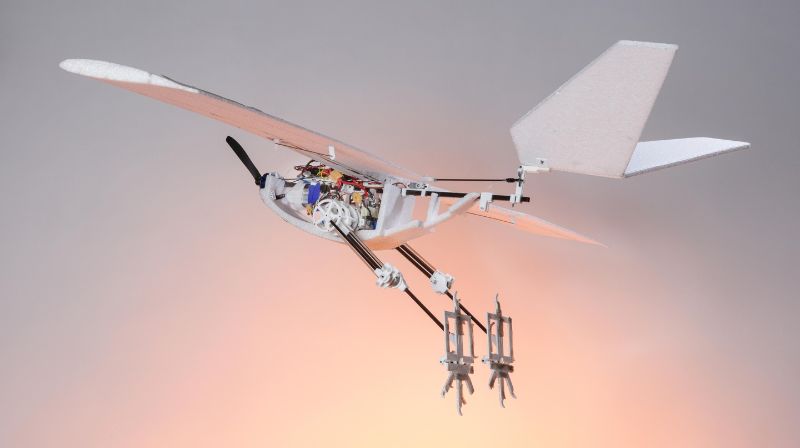
Das Design von RAVEN zielt darauf ab, die Vielfalt der Gangarten zu maximieren und gleichzeitig die Masse zu minimieren. Inspiriert von den Proportionen der Vogelbeine (und langen Beobachtungen von Krähen auf dem EPFL-Campus), entwarf Shin einen Satz massgeschneiderter, multifunktionaler Vogelbeine für eine Starrflügler-Drohne. Er verwendete eine Kombination aus mathematischen Modellen, Computersimulationen und experimentellen Iterationen, um ein optimales Gleichgewicht zwischen der Komplexität der Beine und dem Gesamtgewicht der Drohne (0,62 kg) zu erreichen. Das daraus resultierende Bein hält schwerere Komponenten nahe am «Körper», während eine Kombination aus Federn und Motoren die kräftigen Sehnen und Muskeln von Vögeln nachahmt. Leichte, von Vögeln inspirierte Füsse, die aus zwei gelenkigen Strukturen bestehen, hebeln ein passives, elastisches Gelenk aus, das verschiedene Haltungen beim Gehen, Hüpfen und Springen unterstützt.
«Die Umsetzung von Vogelbeinen und -füssen in ein leichtes Robotersystem stellte uns vor Konstruktions-, Integrations- und Steuerungsprobleme, die Vögel im Laufe der Evolution elegant gelöst haben», sagt Floreano, «Das hat uns nicht nur dazu gebracht, die bisher multimodalste geflügelte Drohne zu entwickeln, sondern auch die energetische Effizienz des Springens für den Start sowohl bei Vögeln als auch bei Drohnen zu beleuchten.» Die Forschungsarbeit wurde in Nature veröffentlicht .
Besserer Zugang für Lieferungen oder Katastrophenhilfe
Bisherige Laufroboter waren zu schwer, um springen zu können, und Roboter, die springen sollten, hatten keine Füsse, die zum Laufen geeignet waren. Das einzigartige Design von RAVEN ermöglicht es ihm, zu gehen, Lücken im Gelände zu überqueren und sogar auf eine 26 Zentimeter hohe Fläche zu springen. Die Wissenschaftlerinnen experimentierten auch mit verschiedenen Arten der Flugauslösung, einschliesslich des Abhebens im Stehen und im Sturzflug, und fanden heraus, dass der Sprung in die Luft die kinetische Energie (Geschwindigkeit) und die potenzielle Energie (Höhengewinn) am effizientesten nutzt. Die LIS-Forschenden arbeiteten mit Auke Ijspeert vom BioRobotics Lab der EPFL und mit dem Neuromechanics Lab von Monica Daley an der University of California, Irvine, zusammen, um die Biomechanik von Vögeln an die robotische Fortbewegung anzupassen.
Die Ergebnisse verdeutlichen nicht nur die Kosten und Vorteile kräftiger Beine bei Vögeln, die häufig zwischen Luft und Boden wechseln, sondern bieten auch ein leichtes Design für geflügelte Drohnen, die sich in unwegsamem Gelände fortbewegen und ohne menschliches Eingreifen von begrenzten Orten abheben können. Diese Fähigkeiten ermöglichen den Einsatz solcher Drohnen für Inspektionen, Katastrophenschutz und Lieferungen auf engem Raum. Das EPFL-Team arbeitet bereits an einer verbesserten Konstruktion und Steuerung der Beine, um die Landung in verschiedenen Umgebungen zu erleichtern.
«Die Flügel von Vögeln sind das Äquivalent zu den Vorderbeinen von Vierbeinern auf dem Land, aber über die Koordination von Beinen und Flügeln bei Vögeln ist wenig bekannt - von Drohnen ganz zu schweigen. Diese Ergebnisse sind nur ein erster Schritt zu einem besseren Verständnis der Konstruktions- und Kontrollprinzipien multimodaler Flugtiere und ihrer Umsetzung in wendige und energetisch effiziente Drohnen», sagt Floreano.
