Simulating how fruit flies see, smell, and navigate
All animals, large or small, have to move at an incredible precision to interact with the world. Understanding how the brain controls movement is a fundamental question in neuroscience. For larger animals, this is challenging because of the complexity of their brains and nervous systems. But the fruit fly, Drosophila melanogaster, has a smaller and therefore more easily mappable brain, allowing scientists to gain detailed insights into how its nervous system drives behavior.
To understand how the nervous system controls actions, researchers at the group of Pavan Ramdya at EPFL created a simulated reality where a virtual fly can operate and respond the way real flies do. This program, known as NeuroMechFly v2, implements a neuromechanical model that goes beyond basic motor functions. By incorporating visual and olfactory sensing, complex terrains, and fine motor feedback, NeuroMechFly v2 simulates how a fruit fly would navigate through its environment while reacting to sights, smells, and obstacles.
Simulating real-life sensing and movement
Ramdya’s research has focused on digitally replicating the principles underlying Drosophila motor control. In 2019, his group published DeepFly3D, a software that uses deep learning to capture how fly’s legs move based on images from multiple cameras. In 2021, Ramdya’s team revealed LiftPose3D, a method for reconstructing 3D animal poses from images taken from a single camera. These efforts were complemented by his 2022 publication of NeuroMechFly, a first morphologically accurate digital “twin” of Drosophila.
With the second iteration of NeuroMechFly, the researchers have now added detailed features that mimic real fly anatomy and physiology. For example, they carefully updated the leg and joint angles to better match the biomechanics of real fruit fly movements. The model’s “brain” can now process visual and olfactory information through virtual eyes and antennae, giving it a sensory experience close to that of an actual fruit fly.
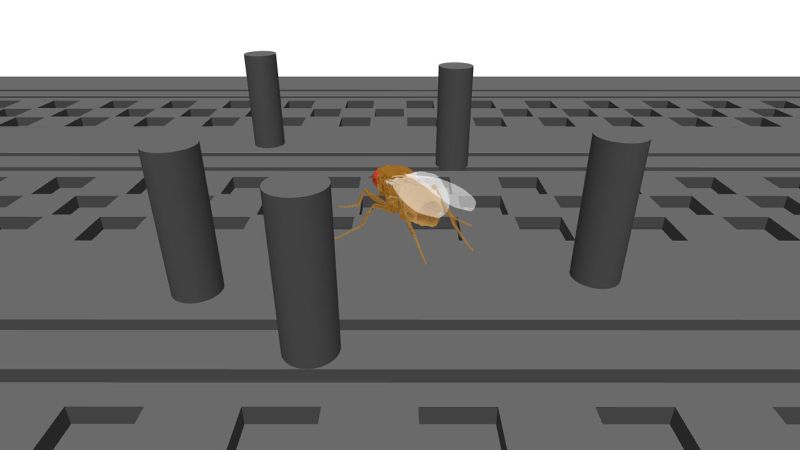
This setup lets NeuroMechFly v2 simulate different control strategies for real-life tasks such as walking over rough terrain or turning in response to smells and visual cues. The team has demonstrated realistic fly behavior under different conditions. For instance, the model can track a moving object visually or navigate towards an odor source, while avoiding obstacles in its path.
Modeling neural activities to understand fruit fly’s main behaviors
NeuroMechFly also allows researchers to infer neural activities in the brain based on the fly’s experience in the virtual world. “By interfacing NeuroMechFly v2 with a recently published computational model of the fly’s visual system, researchers can read out not only what the fly is seeing in the simulated environment, but also how real neurons might be responding,” says Sibo Wang-Chen, who led the research.
With access to these neural activities, the scientists modelled how the fly might chase another fly—for example, during courtship—in a biologically plausible way. This was possible due to the hierarchical control system in the model, which lets higher-level “brain” functions interact with the lower-level motor functions—an organization that mimics how real animals process sensory input and control their bodies.
Finally, researchers can also use NeuroMechFly v2 to study how the brain integrates sensory signals to maintain an awareness of the animal’s state. To demonstrate this, Ramdya’s team replicated the fly’s ability to use feedback signals from leg movements to keep track of its location—a behavior called path integration. This feature allows the simulated fly to “know” where it is, even when its visual inputs are limited. This kind of closed-loop sensory processing is a hallmark of biological intelligence and a critical milestone for neuroengineering.
Brain-body coordination to inspire robotics and AI
Taken together, NeuroMechFly v2 enables researchers to investigate how the brain controls crucial behaviors using computational models. This paves the way for deeper insights into brain-body coordination, especially for species with complex sensory-motor systems. In the future, this model could serve as a blueprint for designing robots that navigate using sensory cues, such as tracking odors or adjusting movements to stabilize visuals, like real animals exploring their environments.
By improving machine learning models that control these simulations, researchers can also learn how animal intelligence can pave the way for AI systems that are more autonomous, robust, and responsive to their surroundings.
