Quand les drones prennent leur envol sur deux pattes
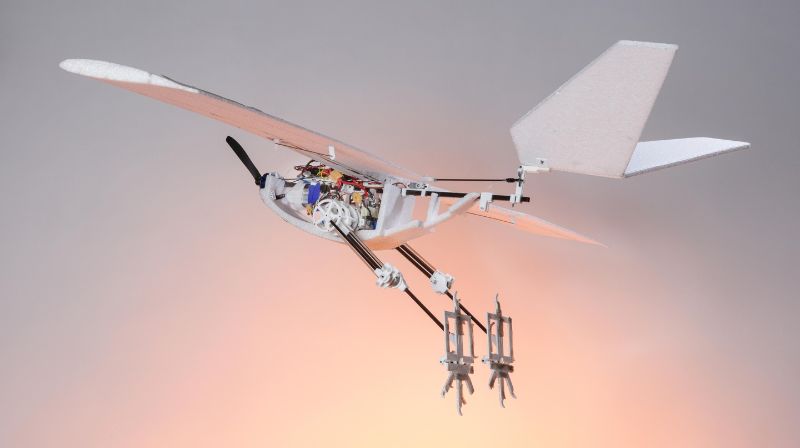
«À vol d’oiseau» est une expression courante désignant la distance la plus courte entre deux points. Dirigé par Dario Floreano, le Laboratoire des systèmes intelligents (LIS) de la Faculté des sciences et techniques de l’ingénieur de l’EPFL a pris cette expression au pied de la lettre avec RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments). Conçues d’après les oiseaux perchés comme les corbeaux et les corneilles, qui alternent souvent entre l’air et le sol, les pattes robotiques multifonctionnelles lui permettent de s’envoler de manière autonome dans des environnements auparavant inaccessibles aux drones ailés.
«Les oiseaux ont inspiré la création des avions et les frères Wright ont réalisé le rêve de faire voler les humains. Néanmoins, même les avions d’aujourd’hui sont encore loin de ce dont les oiseaux sont capables de faire», affirme Won Dong Shin, doctorant au LIS. «Les oiseaux peuvent alterner la marche et la course pour s’envoler ou se poser, sans l’aide d’une piste ou d’un lanceur. Les plateformes d’ingénierie pour ce genre de mouvements font encore défaut en robotique.»
La conception de RAVEN vise à optimiser la diversité de la démarche tout en réduisant la masse. Inspiré par les proportions des pattes d’oiseaux (et les longues observations de corneilles sur le campus de l’EPFL), Won Dong Shin a conçu une paire de pattes d’oiseaux personnalisées et multifonctionnelles pour un drone à voilure fixe. Il a utilisé une combinaison de modèles mathématiques, de simulations informatiques et d’itérations expérimentales pour atteindre un équilibre optimal entre la complexité des pattes et le poids total du drone (0,62 kg). La patte ainsi obtenue maintient les composants les plus lourds près du «corps», tandis qu’une combinaison de ressorts et de moteurs imite les puissants tendons et muscles des oiseaux. D’inspiration aviaire, les pieds légers sont composés de deux structures articulées et tirent parti d’une articulation élastique passive qui soutient diverses postures pour la marche, le sautillement et le saut.
«La transposition des pattes et des pieds aviaires en un système robotique léger nous a confrontés à des problèmes de conception, d’intégration et de contrôle que les oiseaux ont résolus avec élégance au cours de l’évolution», déclare Dario Floreano. «Cela nous a amenés non seulement à inventer le drone ailé le plus multimodal à ce jour, mais aussi à mettre en lumière l’efficacité énergétique du saut pour l’envol, tant pour les oiseaux que pour les drones.» Leur recherche a été publiée dans la revue Nature.
Meilleur accès pour les livraisons ou les secours en cas de catastrophe
Les anciens robots conçus pour marcher étaient trop lourds pour sauter, tandis que ceux créés pour sauter n’avaient pas de pieds adaptés à la marche. Le design unique de RAVEN lui permet de marcher, de franchir des trous et même de sauter sur une surface surélevée de 26 centimètres de haut. Les scientifiques ont également expérimenté différents modes d’initiation au vol, y compris l’envol en position debout et en chute libre. Ils ont constaté que le saut pour l’envol permettait l’utilisation la plus efficace de l’énergie cinétique (vitesse) et de l’énergie potentielle (gain de hauteur). Les scientifiques du LIS se sont associés à Auke Ijspeert du Laboratoire de biorobotique de l’EPFL et au Laboratoire de neuromécanique de Monica Daley de l’Université de Californie à Irvine pour adapter la biomécanique aviaire à la locomotion robotisée.
En plus de déterminer les coûts et les avantages des pattes puissantes des oiseaux qui alternent souvent entre l’air et le sol, les résultats offrent une conception légère pour les drones ailés qui peuvent se déplacer sur des terrains accidentés et s’envoler à partir d’endroits restreints sans intervention humaine. Ces capacités permettent l’utilisation de tels drones pour l’inspection, l’atténuation des effets des catastrophes et la livraison dans des zones confinées. L’équipe de l’EPFL travaille déjà à l’amélioration de la conception et du contrôle des pattes pour faciliter l’atterrissage dans différents environnements.
«Les ailes des oiseaux sont comparables aux pattes avant chez les quadrupèdes terrestres, mais on sait peu de choses sur la coordination des pattes et des ailes chez les oiseaux, sans parler des drones. Ces résultats sont un premier pas vers une meilleure compréhension des principes de conception et de contrôle des animaux volants multimodaux, et leur transposition en drones agiles et économes en énergie», explique Dario Floreano.
